#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
const int train_samples = 1;
const int classes = 10;
const int sizex = 20;
const int sizey = 30;
const int ImageSize = sizex * sizey;
char pathToImages[] = "/Users/powenko/Desktop/靜宜大學/20161001-課程-無人機安全監控/OpenCV/opencv/XCode/06OCR/sample11_OCR1/test";
void PreProcessImage(Mat *inImage,Mat *outImage,int sizex, int sizey);
void LearnFromImages(CvMat* trainData, CvMat* trainClasses);
void RunSelfTest(KNearest& knn2);
void AnalyseImage(KNearest knearest);
/** @function main */
int main(int argc, char** argv)
{
CvMat* trainData = cvCreateMat(classes * train_samples,ImageSize, CV_32FC1);
CvMat* trainClasses = cvCreateMat(classes * train_samples, 1, CV_32FC1);
namedWindow("single", CV_WINDOW_AUTOSIZE);
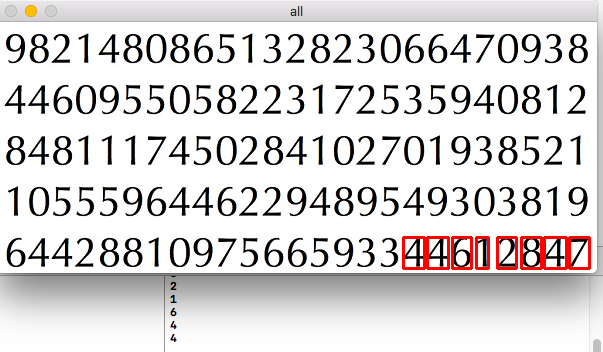
namedWindow("all",CV_WINDOW_AUTOSIZE);
LearnFromImages(trainData, trainClasses);
KNearest knearest(trainData, trainClasses);
RunSelfTest(knearest);
cout << "losgehtsn";
AnalyseImage(knearest);
return 0;
}
void PreProcessImage(Mat *inImage,Mat *outImage,int sizex, int sizey)
{
Mat grayImage,blurredImage,thresholdImage,contourImage,regionOfInterest;
vector<vector<Point> > contours;
cvtColor(*inImage,grayImage , COLOR_BGR2GRAY);
GaussianBlur(grayImage, blurredImage, Size(5, 5), 2, 2);
adaptiveThreshold(blurredImage, thresholdImage, 255, 1, 1, 11, 2);
thresholdImage.copyTo(contourImage);
findContours(contourImage, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
int idx = 0;
size_t area = 0;
for (size_t i = 0; i < contours.size(); i++)
{
if (area < contours[i].size() )
{
idx = i;
area = contours[i].size();
}
}
Rect rec = boundingRect(contours[idx]);
regionOfInterest = thresholdImage(rec);
resize(regionOfInterest,*outImage, Size(sizex, sizey));
}
void LearnFromImages(CvMat* trainData, CvMat* trainClasses)
{
Mat img;
char file[255];
for (int i = 0; i < classes; i++)
{
sprintf(file, "%s/%d.png", pathToImages, i);
img = imread(file, 1);
if (!img.data)
{
cout << "File " << file << " not foundn";
exit(1);
}
Mat outfile;
PreProcessImage(&img, &outfile, sizex, sizey);
for (int n = 0; n < ImageSize; n++)
{
trainData->data.fl[i * ImageSize + n] = outfile.data[n];
}
trainClasses->data.fl[i] = i;
}
}
void RunSelfTest(KNearest& knn2)
{
Mat img;
CvMat* sample2 = cvCreateMat(1, ImageSize, CV_32FC1);
// SelfTest
char file[255];
int z = 0;
while (z++ < 10)
{
int iSecret = rand() % 10;
//cout << iSecret;
sprintf(file, "%s/%d.png", pathToImages, iSecret);
img = imread(file, 1);
Mat stagedImage;
PreProcessImage(&img, &stagedImage, sizex, sizey);
for (int n = 0; n < ImageSize; n++)
{
sample2->data.fl[n] = stagedImage.data[n];
}
float detectedClass = knn2.find_nearest(sample2, 1);
if (iSecret != (int) ((detectedClass)))
{
cout << "Falsch. Ist " << iSecret << " aber geraten ist "
<< (int) ((detectedClass));
exit(1);
}
cout << "Richtig " << (int) ((detectedClass)) << "n";
imshow("single", img);
//waitKey(0);
}
}
void AnalyseImage(KNearest knearest)
{
CvMat* sample2 = cvCreateMat(1, ImageSize, CV_32FC1);
Mat image, gray, blur, thresh;
vector < vector<Point> > contours;
std::string tPath=pathToImages;
tPath.append("/buchstaben.png");
image = imread(tPath, 1);
cvtColor(image, gray, COLOR_BGR2GRAY);
GaussianBlur(gray, blur, Size(5, 5), 2, 2);
adaptiveThreshold(blur, thresh, 255, 1, 1, 11, 2);
findContours(thresh, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
vector < Point > cnt = contours[i];
if (contourArea(cnt) > 50)
{
Rect rec = boundingRect(cnt);
if (rec.height > 28)
{
Mat roi = image(rec);
Mat stagedImage;
PreProcessImage(&roi, &stagedImage, sizex, sizey);
for (int n = 0; n < ImageSize; n++)
{
sample2->data.fl[n] = stagedImage.data[n];
}
float result = knearest.find_nearest(sample2, 1);
rectangle(image, Point(rec.x, rec.y),
Point(rec.x + rec.width, rec.y + rec.height),
Scalar(0, 0, 255), 2);
imshow("all", image);
cout << result << "n";
imshow("single", stagedImage);
waitKey(0);
}
}
}
}
