#include <stdio.h>
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/nonfree/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/nonfree/nonfree.hpp>
using namespace cv;
void readme();
/** @function main */
int main( int argc, char** argv )
{
//if( argc != 3 )
//{ readme(); return -1; }
Mat img_1 = imread( "/Users/powenko/Desktop/taipei_101_2.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( "/Users/powenko/Desktop/taipei_101.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
//int minHessian = 400;
SiftFeatureDetector detector;
std::vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Draw keypoints
Mat img_keypoints_1; Mat img_keypoints_2;
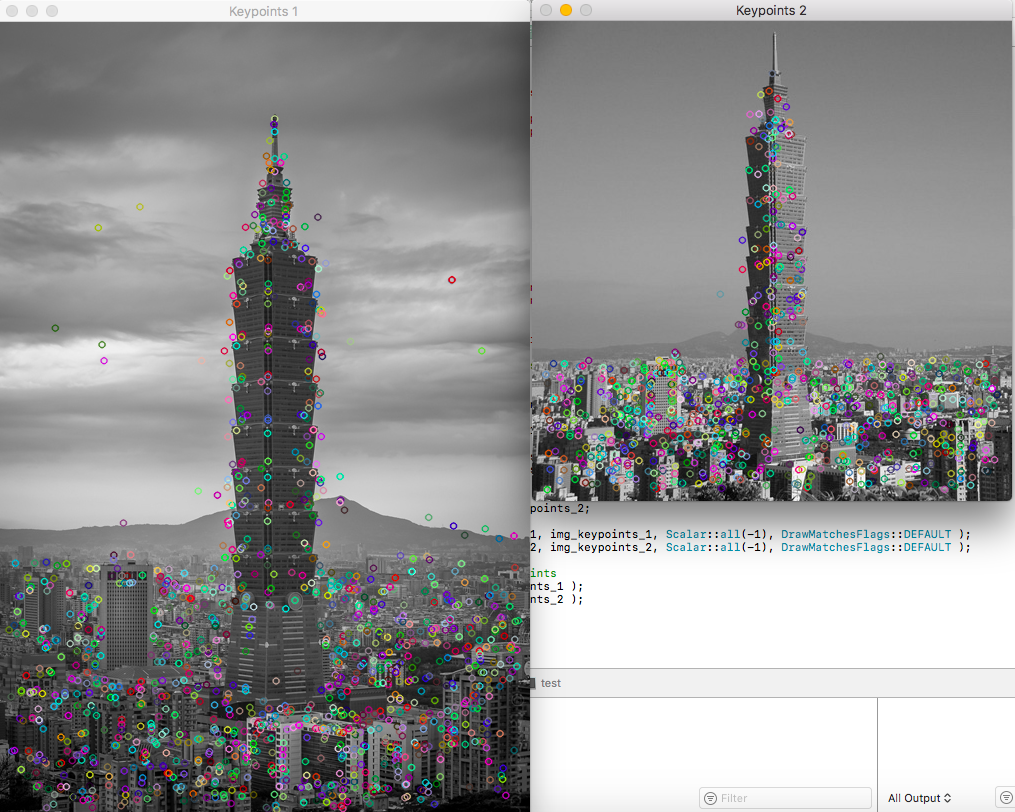
drawKeypoints( img_1, keypoints_1, img_keypoints_1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
drawKeypoints( img_2, keypoints_2, img_keypoints_2, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
//-- Show detected (drawn) keypoints
imshow("Keypoints 1", img_keypoints_1 );
imshow("Keypoints 2", img_keypoints_2 );
waitKey(0);
return 0;
}
/** @function readme */
void readme()
{ std::cout << " Usage: ./SURF_detector <img1> <img2>" << std::endl; }
