PX4 硬體
該PX4項目設計了一系列用於指導車輛人類輔助和完全自主操作的硬件模塊。在當前可用的模塊包括主自動駕駛儀(稱為FMU – 飛行管理單元),特定於平台的載體(稱為IO – 輸入/輸出)模塊,輸出伺服信號和電機的命令和光流相機模塊。
所有模塊都是CC-BY-SA開放硬件設計。 商業硬件產品和開放式硬件注意事項
Autopilot 模組
PIXRACER X1 Autopilot

Pixracer X1 是最新加入到PX4硬件家人。這是從根本上減少了FPV賽車, 飛機和功能,只有主處理器。
-
168 MHz Cortex M4F CPU (256 KB RAM, 2 MBFlash)
-
Sensors: New 3D ACC / Gyro / MAG / Baro
-
microSD slot, 3 UARTs, 1 CAN, 1 I2C, ADC
詳細資料
PIXHAWK 1 Autopilot
![]()
PIXHAWK 是所有功能於一身的單位,結合FMU 和IO組合成一個單一封裝,並擁有硬件浮點單元和SIMD。
-
168 MHz Cortex M4F CPU (256 KB RAM, 2 MBFlash)
-
Sensors: 3D ACC / Gyro / MAG / Baro
-
Integrated backup, override and failsafe processor with mixing
-
microSD slot, 5 UARTs, CAN, I2C, SPI, ADC, etc
PX4FMU Autopilot (FMUv1)

PX4FMU 是核心模塊:飛行管理單元 the Flight Management Unit.。隨著硬件浮點單元和SIMD。
-
168 MHz Cortex M4F CPU (196 KB/1 MB)
-
Sensors: 3D ACC / Gyro / MAG / Baro
-
microSD slot, 50 pins of connectivity
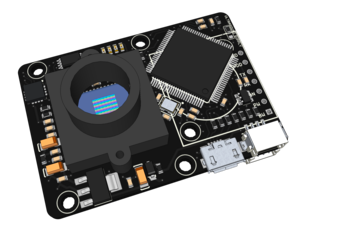
PX4FLOW Smart Camera

PX4Flow is an optical flow camera. Provides optical flow at 250 Hz. Unlike mouse sensors it works indoors without illumination LED.是一個光學照相機。提供在250赫茲光流。不像鼠標傳感器( mouse sensors),它可以工作在無光室內環境。
-
168 MHz Cortex M4F CPU (196 KB RAM)
-
752×480 MT9V034 imager, 3D Gyro
-
16 mm M12 lens, microSD slot